
Anotace
Cílem předmětu je poskytnout přehled o základních technických a matematických konceptech stojících za tvorbou fotorealistických obrazů. Úvodní část kurzu se zabývá tradičními technikami jako je Whittedův ray tracer, akcelerační datové struktury, přenos světla a jeho interakce s okolím. Následuje popis globálního osvětlení a řešení zobrazovací rovnice metodou Monte Carlo. Výsledky z implementace probíraných metod a postupů můžete vidět na následujících obrázcích.


Předmět volně navazuje na úvodní bakalářský kurz Základy počítačové grafiky a pokrývá hlavní principy fotorealistické syntézy obrazu. Jsou probírána zejména tato témata: metoda sledování paprsku, osvětlovací modely, modely odrazu světla od povrchu (BRDF), zobrazovací rovnice, základy metody Monte Carlo pro simulaci transportu světla, zajištění fyzikální korektnosti výsledků, urychlování výpočtů, vyhlazování obrazu a popis základních optických materiálových modelů. Cvičení úzce korespondují s přednáškami a předpokládá se praktická realizace zmíněných témat v prostředí jazyka C++.
Plán výuky
| Den | Čas | Přednáška |
| 18. 9. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 1 |
| 25. 9. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 2 |
| 2. 10. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 3 |
| 9. 10. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 4 |
| 16. 10. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 5 |
| 23. 10. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 6 |
| 30. 10. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 7 |
| 6. 11. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 8 |
| 13. 11. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 9 |
| 20. 11. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 10 |
| 27. 11. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 11 |
| 4. 12. 2025 | 14:15 – 15:45, 16:00 - 17:30 | přednáška a cvičení č. 12 |
| 11. 12. 2025 | 14:15 – 15:45, 16:00 - 17:30 | Odevzdání řešení zadaných úloh |
Literatura
Vedle doporučené literatury uvedené na slidech první přednášky (především tato on-line kniha a tyto přehledové tabulky), jsou jako materiál ke studiu k dispozici tato skripta (kapitola 3), popřípadě novější verze skript (kapitoly 1.1-1.3 a 3) obsahující některá rozšíření.
Zápočet
Maximální bodový zisk za vypracování (tj. provedení implementace a ověření funkčnosti) jednotlivých úloh naleznete zde. U všech odevzdávaných úloh se předpokládá perfektní orientace ve zdrojovém kódu a porozumění použitým metodám a postupům. Nejzazším termínem pro udělení zápočtu je 12. 12. 2025.
Zkouška
Zkouška je ústní s písemnou přípravou (max. 55 bodů). Zkušební otázky korespondují s tématy na přednáškách, seznam okruhů zkušebních otázek naleznete zde. Primárním zdrojem informací pro přípravu ke zkoušce jsou prezentace a poznámky z přednášek. Další doporučená literatura je uvedena na slidech první přednášky. Termíny zkoušek budou vypsány během zkouškového období v Edisonu.
Přednáška 1
Úvodní přednáška, reprezentace geometrie, kolize parsku s geometrií, model jednoduché kamery
Přednáška 2
Základy rádiometrie a fotometrie, Whittedův ray tracer, barevné prostory
Přednáška 3
Lom a odraz paprsku, mapy prostředí
Přednáška 4
Akcelerační datové struktury a jejich další urychlení, supersampling, hloubka ostrosti
Přednáška 5
Přednáška 6 - 10
Path Tracing, BRDF, modifikovaný Phong a jeho normalizace, konzervace energie, vzorkování zdrojů
Cvičení
Cvičení budou probíhat formou implementace úloh z přednášek a k zápočtu je možno získat max. 45 bodů. Jednotlivé úlohy budou hodnoceny v zápočtovém týdnu. Bodové ohodnocení úloh se odvíjí od jejich obtížnosti, správnosti implementace a vizuální kvality prezentovaných výsledků. Při předvádění dosažených výsledků se očekává perfektní orientace v implementovaném kódu. Celkem bude možno z cvičení získat 45 bodů.
Cvičení 1
Hlavním cílem prvního cvičení je seznámení se s šablonou (pro VS2022), kterou je možno využít pro usnadnění vypracování úloh z jednotlivých cvičení. Na cvičení budeme probírat následující témata: reprezentace vstupní geometrie (formát OBJ), vertexy, normály, materiály (formát MTL) a textury, základní funkční prvky a operace používané v algoritmech sledování paprsků. Rovněž bude popsána základní funkcionalita knihovny Embree.
{kind=link}
Cvičení 2
Hlavním cílem druhého cvičení je implementace metody GenerateRay do třídy Camera pro generování primárního paprsku a otestování její funkčnosti. Výsledkem tohoto cvičení by mělo být zobrazení testovací scény v následující podobě:
Cvičení 3
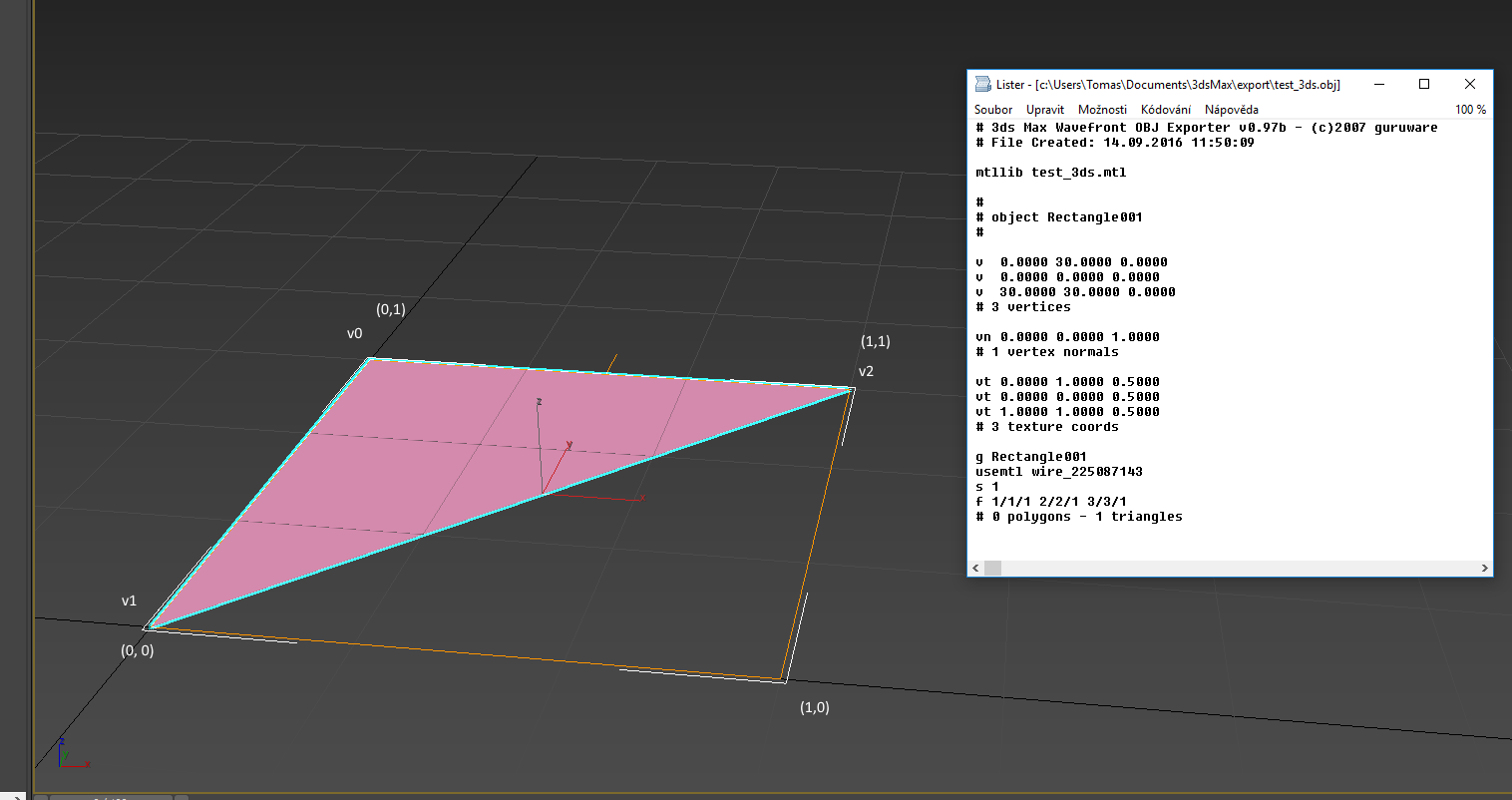
Hlavním cílem třetího cvičení je implementace jednoduchého normálového shaderu a otestování jeho funkčnosti. Popis postupu je obsahem cvičení. Význam barycentrických souřadnic u a v potřebných např. pro interpolaci normál a nanášení textur je znázorněn ZDE. Model z ukázek naleznete ZDE. Můžete také použít TENTO alternativní model.
Na cvičení budeme probírat následující témata: implementace normálového shaderu, interpolace normál a texturovacích souřadnic.
Cvičení 4
Hlavním cílem čtvrtého cvičení je implementace základního Phongova osvětlovacího modelu. Popis postupu je obsahem cvičení.
Na cvičení budeme probírat následující témata: Phongův osvětlovací model.
Cvičení 5
Hlavním cílem pátého cvičení je implementace environmentální mapy, která bude sloužit jako textura prostředí a později ji využijeme pro nasvětlení scény. Popis postupu je obsahem cvičení a naleznete ho rovněž ZDE.
Na cvičení budeme probírat následující témata: načítání textur a implementace environmentální mapy.
Cvičení 7, 8
Hlavním cílem sedmého cvičení je implementace lomu paprsku. Popis postupu je obsahem přednášky. Pro otestování funkcionality doporučuji použít jednoduchý model jednotkové koule umístěné v počátku. Rovněž doporučuji mít naimplementovanou environmentální mapu pro snadnější kontrolu výsledků.


Na cvičení budeme probírat následující téma: implementace trasování průhledných materiálů.
Cvičení 9, 10
Hlavním cílem deváteho cvičení je implementace základního path tracingu pro Lambertovskou BRDF. Ucelený seznam užitých funkcí naleznete ZDE. Můžete také použít TENTO model tzv. Cornell boxu.

Na cvičení budeme probírat následující téma: renderovací rovnice, Monte Carlo integrace, BRDF.